All the latest news

Audio speaker diarisation and extraction with a moving robot
We report our progress on audio speaker diarisation and extraction with a moving robot, which goal is to provide several separated audio streams to be transcribed by the automatic speech recognition (ASR) and fed to the multi-party conversational system that will be deployed on ARI, the robotic platform designed [...]

Semantics based localisation in relevant environments
We report on (i) a software with a Natural Language vocabulary (categories) for object recognition that interfaces with the high-level task scheduler for semantic scene understanding, and (ii) updated software for object detection and localization in 3D map based on semantic segmentation and unknown object detection integrated in ARI [...]
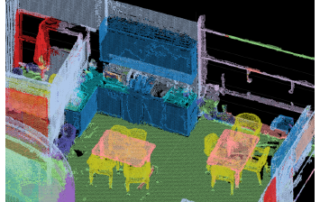
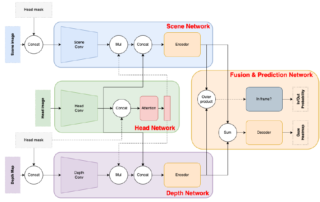
Automated learning of scene representations in realistic environments
We produced a software that includes methods for performing semantic segmentation and instance segmentation at image level and in point cloud. In addition, it proposes two novel methods to efficiently perform continual learning on semantic segmentation and depth estimation. The prototype implementation of tools for the instance segmentation is [...]
Multi-modal behaviour recognition in realistic environments
We present present the first prototype implementation of tools for (a) single target behaviour recognition and (b) group-level behaviour analysis. For single target behaviour recognition, we propose a novel method, which performs unsupervised domain adaptation as well as presenting a new spatial transformer. We then approach the group-level behaviour [...]
Software for Generating Multi-Party Situated Interactions
An intermediate goal of the roject is to provide a simulation environment for interactions between ARI (the robot used within SPRING) and human agents. The simulation allows to generate plausible human behaviour (for example gaze), the synthesis of high-level sensor perception (for example the perception of emotions), the high-level [...]
SPRING Advisory Board’s 2022 recommendations
The second Advisory Board (AB) meeting for the SPRING project took place on 27 January 2022. The consortium presented the achieved technical progress (see our post from November 2021) during the first half of the project, and had fruitful exchanges with the members of the AB. The AB written [...]
Discover the SPRING project in video
To celebrate the first milestone achievement of the SPRING project we created a video presenting the project and its objectives. In particular, it shows the development and deployment of our robotic platform SPRING-ARI at 7 venues al around Europe.

SPRING’s achievements in its first half
We are half-way into SPRING (the project, not the season!), and we are proud to report the following achievements: We have produced, customised and delivered 7 SPRING-ARI units to partners; We have developed and integrated more than 10 software modules, into an integrated software architecture by working collaboratively; We [...]
SPRING-ARI’s initial software architecture
The SPRING-ARI robot has a component-based architecture that instantiates the robotic application by encapsulating different functionalities. This architecture is documented in our Deliverable 7.3, public access possible from our results page. The aim of this document is to provide a first version of the software architecture of the SPRING-ARI [...]

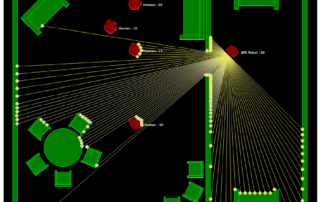
A robot able to know where it stands!
One of the strategic objectives of the SPRING project is to enable robust robot perception in complex, unstructured and populated environments. A necessary component of it is a high quality self-localisation and tracking in cluttered and populated spaces. Given a 3D map of the environment, e.g. a hospital or [...]