All the latest news
Discover the SPRING results in video!
At the occasion of the end of the H2020 SPRING project, we prepared a short, animated-style video to describe our main achievements. Watch it on our Youtube channel!
SPRING’s Advisory Board recommendations for future projects in social robotics
The SPRING project's Advisory Board, composed of renowned experts of the field from around the world, released its final comments regarding the last developments of the project; and pointing towards necessary improvements so as for social robotics to become a more mature field. Detailed comments are consigned in Deliverable [...]
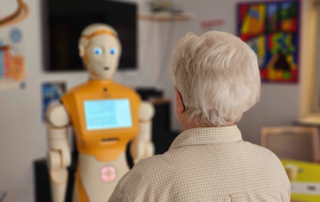
How acceptable (agreeable) is a social robot in a hospital? Field experiment results
Experiments involving interactions of the ARI robot with patients, accompanying persons and healthcare professionals were held at the Broca Day Care Hospital (AP-HP). More than 100 persons participated, which allowed us to assess ARI's usability and acceptability in real-world settings. The protocol of the experiments and a discussion of [...]
Social Robotics courses from our SoRAIM Winter School now available in video!
All of the plenary talks from our Social Robotics, Artificial Intelligence & Multimedia Winter School (SoRAIM) are now available in a playlist within our Youtube channel. Feel free to browse them!
Social Robotics Winter School SoRAIM was a success!
The Social Robotics, Artificial Intelligence and Multimedia (SoRAIM) multi-disciplinary winter school combined topics of interest to the next generation of social roboticists. Top-level invited speakers introduced and discussed all relevant areas for building socially aware robots that communicate and interact with humans in a shared space. Lectures covered the [...]
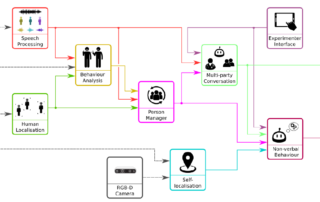
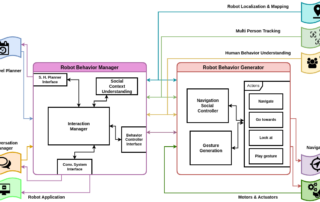
Software architecture for a social robot: SPRING-ARI
We released the final version of the software architecture of the SPRING project on the ARI robot, integrated the software components so as to , to achieve a fully autonomous robot capable of performing the tasks and scenarios defined in the project. The final architecture comprises: 52 SPRING-specific ROS [...]
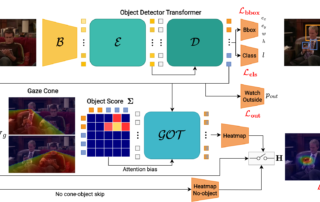
Can we detect how people feel when interacting with a robot? Emotional and robot acceptance analysis
Another important task of the H2020 SPRING project is to advance on what we call “Multi-modal Affect and Robot Acceptance Analysis”. In a recently released document we present frameworks for emotion recognition, gaze target detection, and automatic social acceptance with qualitative and quantitative results. (see details in Deliverable D4.5 [...]
How should a robot behave? ARI’s non verbal behaviour system
One of the objectives of the SPRING project is to develop and implement methodologies enabling the robot to automatically: 1. Explore the environment; 2. Move towards one or several persons; 3. Attract the attention of the selected persons in order to facilitate face-to-face communication; 4. Multi-party conversation management. To [...]
SPRING Advisory Board’s 2023 recommendations
The third Advisory Board (AB) meeting for the SPRING project took place on 15 March 2023. The consortium presented the achieved technical progress during the intermediary integration cycle of the project, and had fruitful exchanges with the members of the AB. The AB written recommendations, which praise the project's [...]

User feedback from the intermediate validation experiments
Within the framework of the SPRING project, five use cases for a socially assistive robot in a hospital context are developed. a) The robot provides a reception or welcoming of the hospital users b) The robot delivers information and reminders on how to have safe social interactions c) The [...]